For my diploma project "very huge machine" I developed small robots that can run on a piece of roof lath. This makes building motion structures really simple since you can just work with a simple saw and a powerdrill.
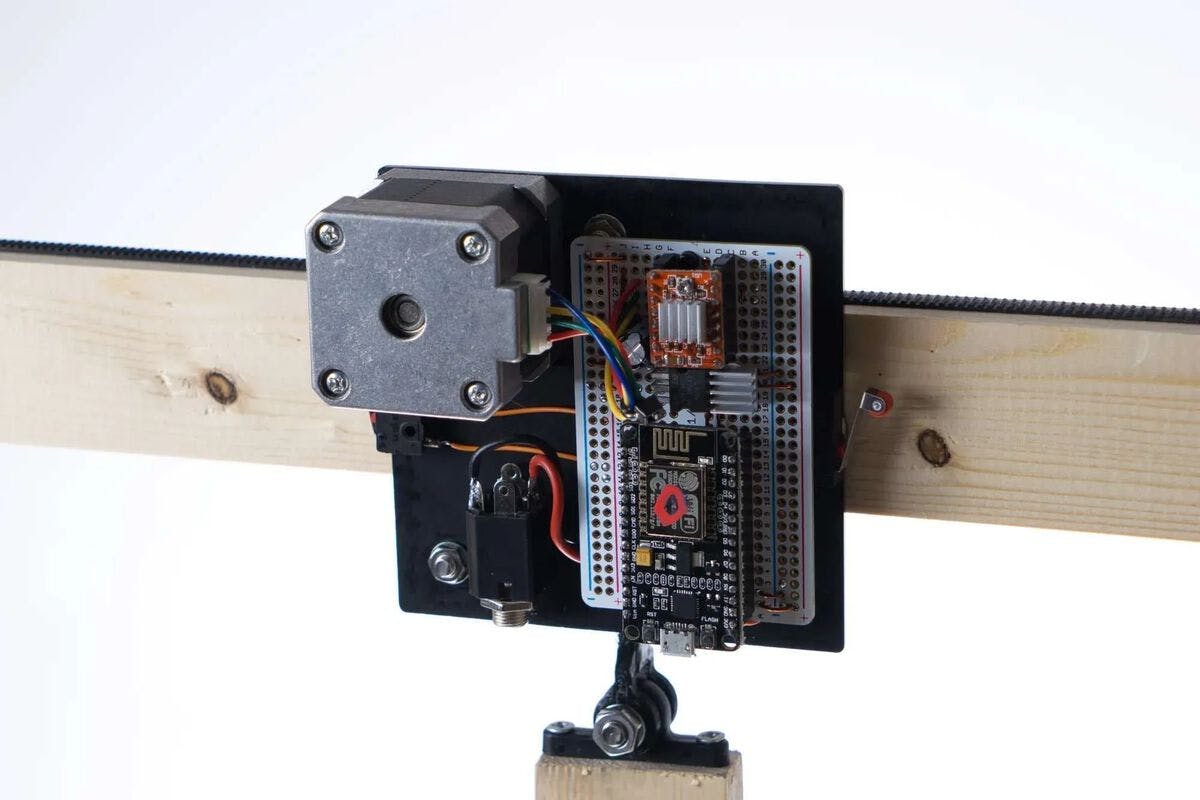
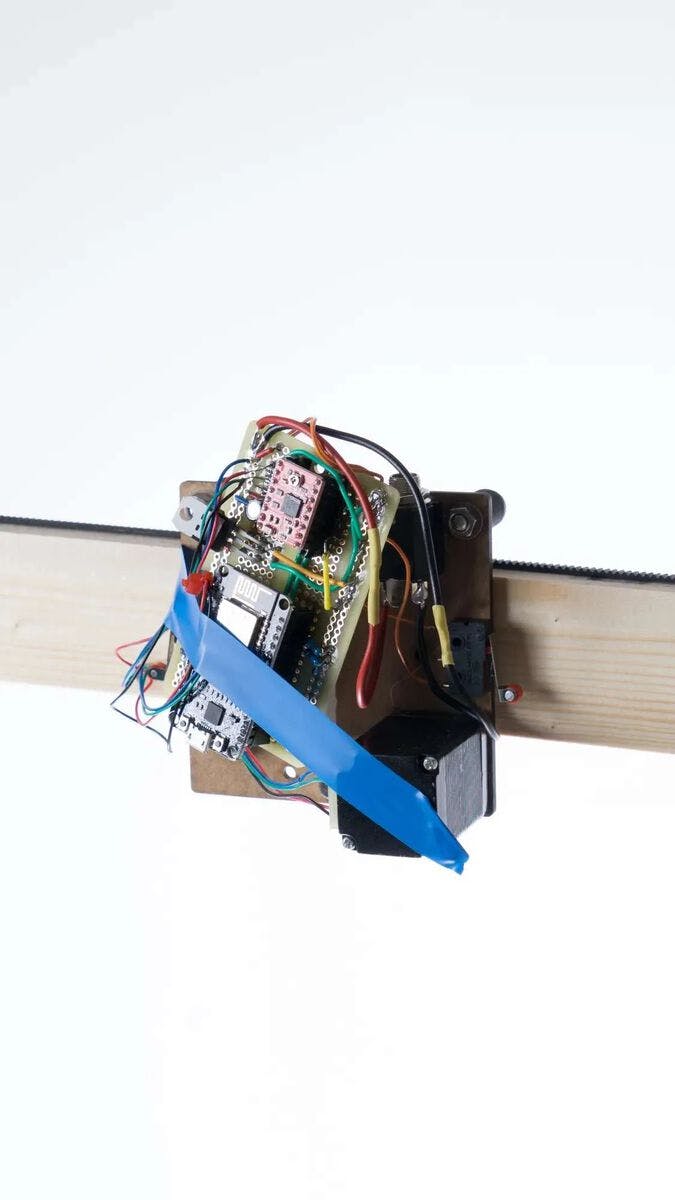
They consist of a nodeMCU microcontroller, a NEMA-17 stepper motor and two endstop switches. A GT2-timing-belt strapped to the rail provides enough grip for the motor to move along the axis.
You can command the motor via a REST- or Websocket-API and fully control the motors position on the axis.
The trickiest part of the whole device was getting the fixation on the roof lath right. After many attempts I settled with an acrylic back plate and a rather complex, 3d-printed "space-frame" that presses multiple ball bearings against the axis to ensure that the agent always has enough grip.